
DEVELOPMENT OF
ADVANCED SOFTWARE
Use our software solutions adapted to your needs in weed recognition on your images for your projects.
TAILORED
SOLUTIONS
For every project we tailor our systems to individual needs. Implementing features to address the questions at hand and challenges you face.
OUR PASSION
IS TO FIND SOLUTIONS
At I∙GIS we thrive by being part of research and development projects. We are committed to advance the agricultural sector through innovative solutions, and have collaborated with several research facilities, universities and companies to achieve this goal.
Our focus lies on developing technologies that optimize the usage of herbicides and fertilizers in agriculture, providing benefits for both farmers' economy and the environment. We have unique knowledge and products, as well as services, that set us apart in the industry.
Our openness to collaboration and research and development projects is what drives us forward, and we are always looking for new opportunities to partner with others in the field, be it in Denmark or beyond.
Our world-class web-based annotation system, powerful machine learning system, and extensive database position us at the forefront of agricultural innovation.
Furthermore, we are happy to help with equipment development and implementation of field trials. Recently, we have started a limited production of camera systems for the current RWM ATW image acquisition system, which is also available for purchase for third parties.
Our team of engaged developers work hard to provide our partners with software solutions for their projects and their customers, e.g. agricultural consultants, farmers, universities, municipalities.

PROJECTS

RoboWeedMaPS
Project period: 01.01.2017 – 31.12.2020
Funding: The project was financed by Innovation Fund Denmark.
Project budget (4 years all partners): 28.000.000 dkk (~3.763.000 €).
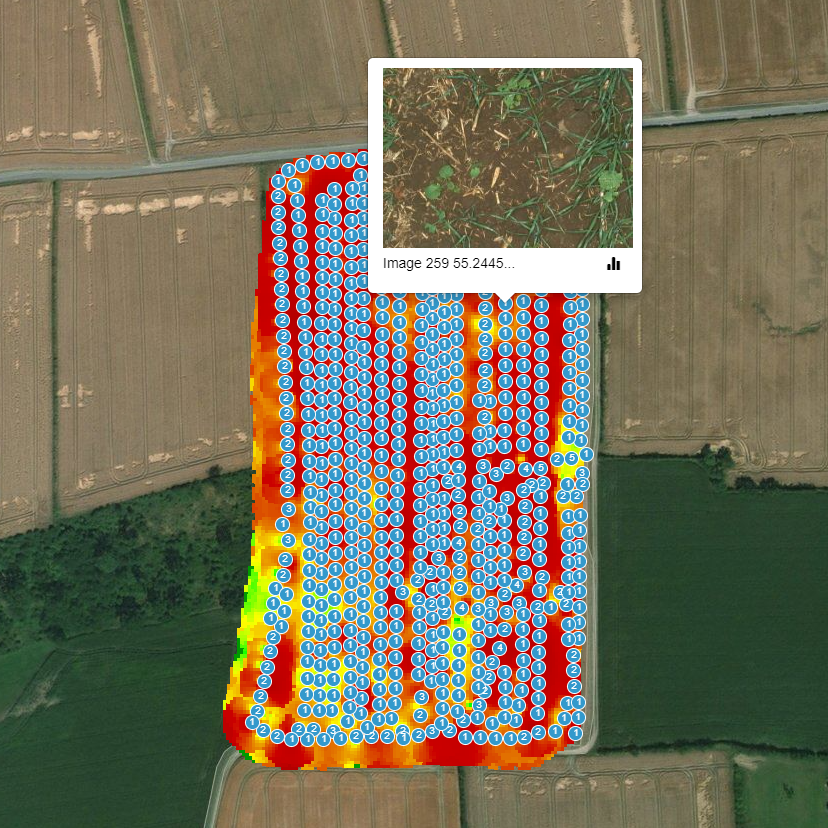
The RoboWeedMaPS project focused on precision weed management in agriculture to resolve the challenges faced in the choice of pesticide doses and active ingredients, due to limited recognition and mapping of present weed species.
The project was a collaboration between multiple public and private partners, including I∙GIS, Aarhus Universit, Datalogisk, IPMConsult, Danfoil and AgroIntelli.
The aim was to automatically map weeds to the family, genus, and species level to improve the use of herbicides. The project goals were to reduce costs, decrease environmental contamination, and increase the efficiency of treatments.
To achieve these goals, I∙GIS contributed with a cloud service for image uploading, and Deep Learning based models for weed recognition, and classification. Furthermore, via Datalogisk, a farm management system was involved to provide farmers with recommendations based on their weed populations. The design of these products allows for them to work individually but generate synergies when used together as part of the RoboWeedMaps chain. Export of parts of this service chain to other countries is thus possible and planned for.
Potential
The partners also conducted a study to analyze potential savings from using RoboWeedMaps and found that it was possible to reduce herbicide consumption by 20-40% when carrying out field-specific treatments and up to 80-90% with site-specific treatments.
You can read the report here:
Analysis of Potential Herbicide Savings – Precision FarmingOutlook
While the project has ended, I∙GIS is constantly working on improving the cloud service and extending the crop and weed databases. Furthermore, in Denmark, Patriotisk Selskab has taken the weed mapping and spray map provision via Datalogisk in production.
Further reading:RoBoWeedMaps
ipmconsult.dk
Datalogisk (danish)
Video material:
RoboWeedMaps - DJI Goggles filming ATV collecting weed images
RoboWeedMaps - Walking the weed maps with your mobile phone

CloverSense
Project period: 01.01.2016 – 31.12.2019
Funding: The project was financed by GUPD
Project budget (2,5 years all partners): 5.497.483 dkk (~793.000 €).
What do smartphones and cameras have to do with grass, clover and nitrogen?
In this project, technology has moved to the grass and clover fields of Denmark to improve economy and environment.
Clover grass is an important source of feed for dairy cows in conventional and organic farming. In Denmark there are about 259.000 ha in 2015 (Statistics Denmark, 2016). For feed quality the optimal clover/grass ratio in a first year's field is 40-50% clover, and the farmer aims to maintain a stable clover proportion throughout the growing season. The performance of the cows is depending on a optimal clover/grass ratio which gives a higher feed uptake. This effect is also known as the "legume plant effect". In order to grow satisfactorily and produce high-quality feed, the parcels must be supplied with nutrients in appropriate quantities.
I∙GIS collaborated in CloverSense with researchers from Aarhus University and AgroIntelli to develop a tool to support the farmer in optimizing the supply of nitrogen to his grass-clover fields by using technical equipment such as, cameras, sensors, algorithms, web platforms and smartphones. The new technology could save agriculture around DKK 96 million a year and reduce the amount of nitrogen impacting our environment and climate.
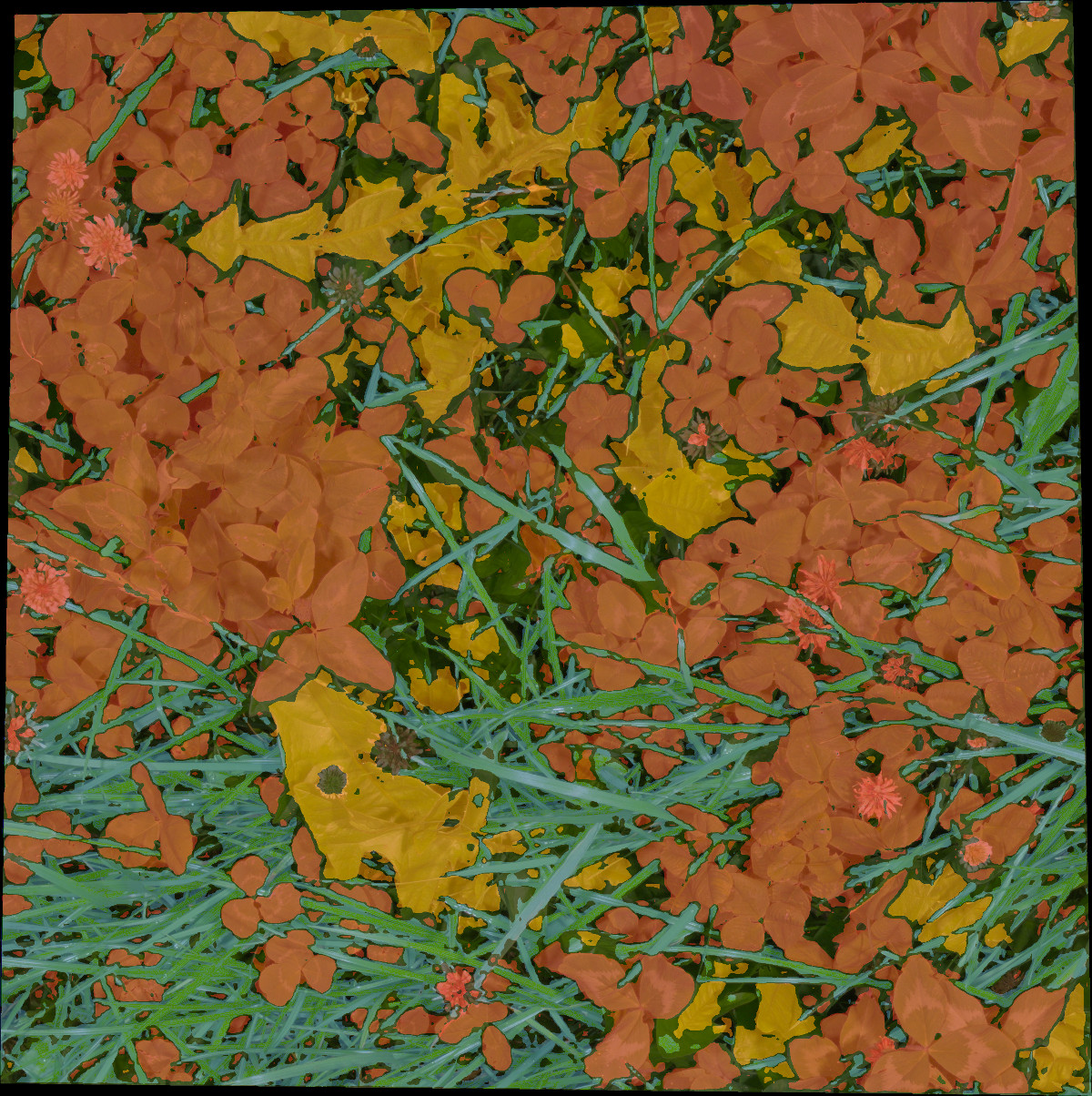
CloverSense adapted existing technologies to determine the ratio of clover to grass. In addition, the project developed algorithms for the application of nitrogen, based on the ratio of clover to grass, and provided fertilizer maps. With these tools the farmer can make better use of the nitrogen, improve the yield of his clover-grass and reduce the supply of nitrogen to the fields.
The project developed three commercial products: a camera system, a web platform and a smartphone application CloverSense.net and CloverSenseMobile from I∙GIS.
Outlook
The project has ended and CloverSense is available free of charge. However, it has not been updated lately. I∙GIS is open for collaborations to commercialize the application and improve its performance.
Further reading:CloverSense
Estimation of the Botanical Composition of Clover-Grass Leys from RGB Images Using Data Simulation and Fully Convolutional Neural Networks (article)
Robust Species Distribution Mapping of Crop Mixtures Using Color Images and Convolutional Neural Networks (article)
CloverSense software

RWMGrowth
Project period: 01.10.2022 – 30.09.2024
Funding: The project was financed by Innovation Fund Denmark
Project budget (2 years): 1.421.751 dkk (~190.839 €).
The application of herbicides bases on the who is there. However, the choice of active ingredients also take the growth stage of plants in accounts as the physiological changes in plants make them more or less efficient.
Implementation of Plant growth stage as decision tool in RoboWeedMaps (RWM).Pesticides are target specific and only work on specific species and growth stages of plants.
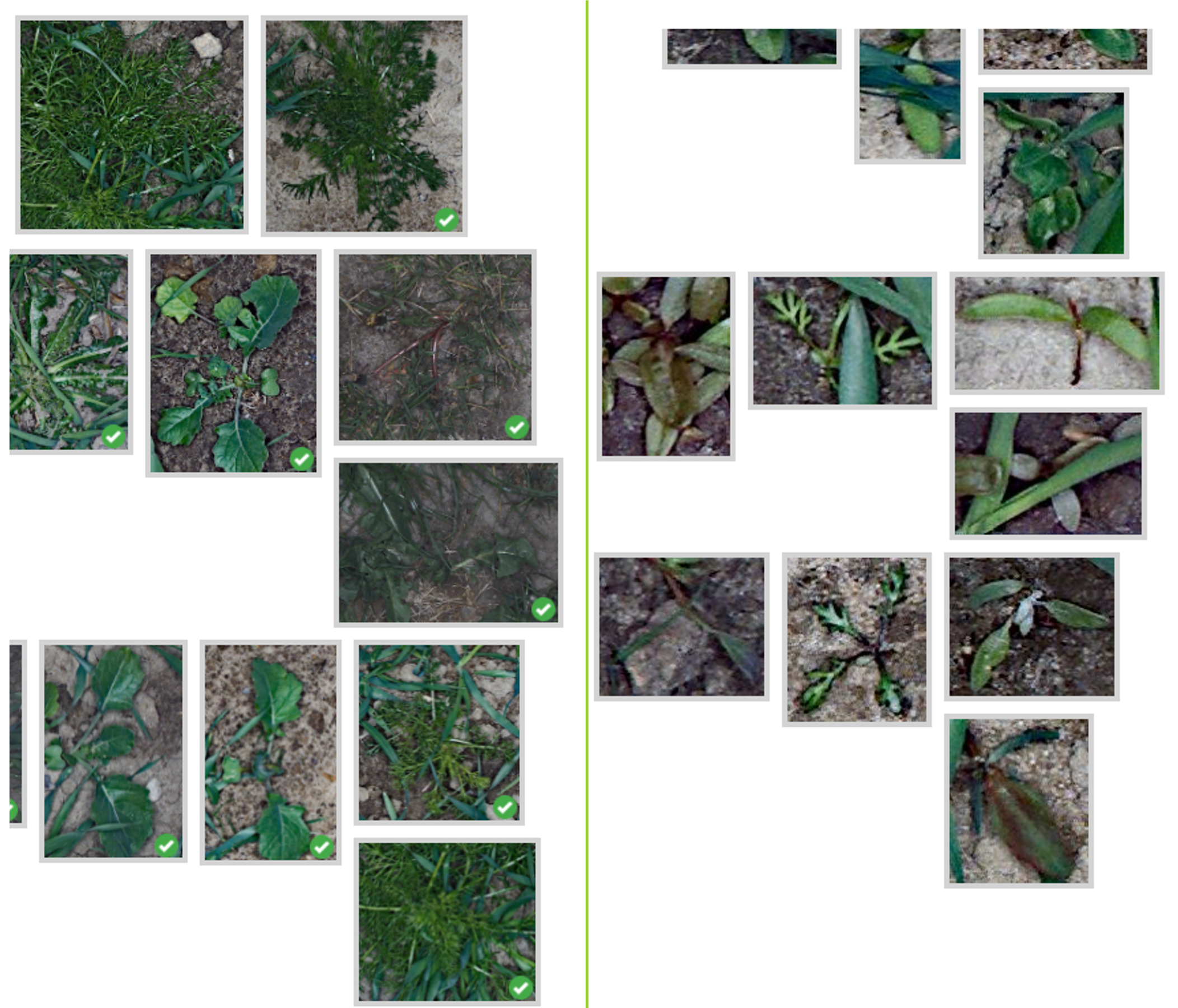
Currently a consultant has to visually evaluate the data we provide to see which growth stages are found in the field to decide which pesticides can be used. This is time consuming = expensive and prolongs considerably the time between image acquisition and treatment. By establishing “Plant growth stage” as a new category it will be possible to differentiate between seven different growth stages, which are the most commonly used for evaluation of treatment options and RWM could then provide weed maps based on these defined growth stages.
When weed maps are established the provided results will be in comparison to todays maps (weed yes or no) more precise and easier to interpret. The consultant/farmer will get faster, better data for immediate use, with reduced changes of errors. RWM will then enable more tailored spraying/treatment, further enhancing economic, financial and time efficiency.
Today all integrated pest management (IPM) bases its evaluations on weed growth stages, thus this new feature will offer more security for the farmer/consultant and IPM recommendations. In consequence, RWM will be able to contribute considerably better to the green transition by the further reduction of the use of pesticides.
Video material: Innobooster Application Video

RoboWeedSupport
Project period: 01.01.2014 – 31.12.2016
Funding: The project was financed by Innovation Fund Denmark
Project budget (3 years all partners): 8.583.991 dkk (~1.152.000 €).
As a precursor of the RoboWeedMaps project, the goal of this project was to develop a herbicide optimizing system that can act as a valuable tool for farmers in their decision making process on the dose and choice of herbicides used in fields.
Due to the negative impact that herbicides have on the environment, the governmental pressure on farming is growing, to reduce the usage of herbicides. As a result, according to EU directive, the farmers have to follow a series of principles of Integrated Pest Management (EU 2000). In practice this means that farmers need to assess what kind of herbicides and what doses are needed in each field. This amounts to a near impossible task for the individual farmer, since he/she might neither have the time nor the knowledge, to identify all weeds in his/her fields, which often leads to an overdose in herbicides, to be on the safe side.
I∙GIS collaborated in CloverSense with researchers from Aarhus University , University of Southern Denmark and several private companies to create a tool that will help farmers assess the weed populations in individual fields and hereby benefit both the farmers economy and the environment by using less but the right herbicides.
Based on the images, present weeds will be noted and this information will be used to construct a herbicide spray recommendation. The identification of weeds is carried out by consultants who use our weed annotation system to identify and annotate weeds. Data on weed species collected in this step, will be used to train an automated decision support system, that eventually will take over and identify the weeds automatically.
This project was the base for our RoboWeedMaps service that can provide automated weed detection, mapping and variable precision control of weeds.
Further reading: RoboWeedSupport: Weed recognition for reduction of herbicide consumption (article)
Video material: Test drive before mapping
MST-RWM-Analysis
Analysis of potential herbicide savings using experience and data from the RoboWeedMaPS project
Project period: 01.01.2014 – 31.12.2016
Funding: The project was financed by
Miljøstyrelsen
Project budget: 127.500 dk.
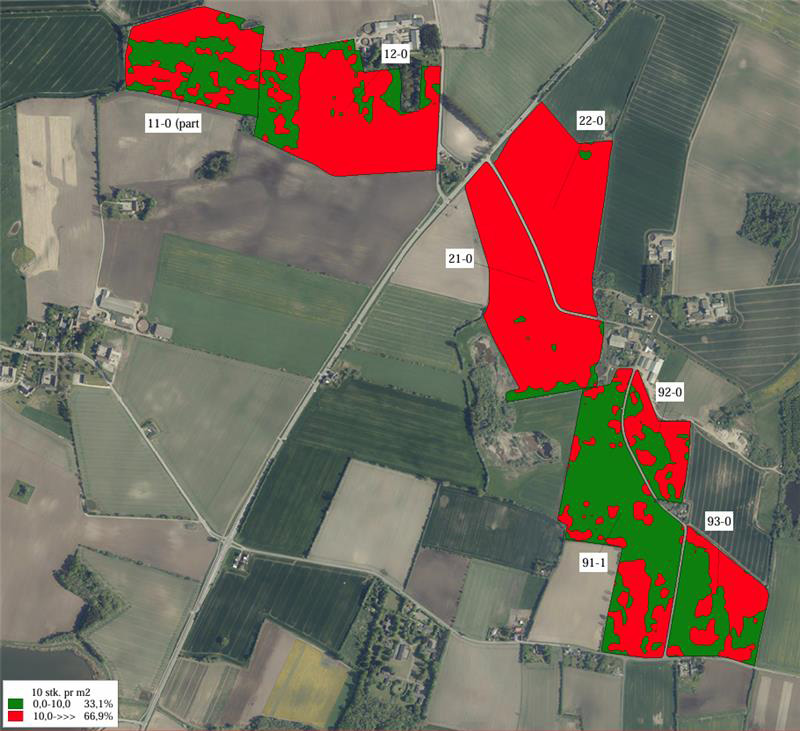
Recent years of research and development of RoboWeedMaPS have shown that it is possible to reduce herbicide consumption by an average of 20-40% when implementing field-specific treatments, and in some cases up to 80% when implementing site-specific treatments.
The purpose of the project was to analyze the potential for reducing herbicide use in winter crops based on existing data from previous data collections from the RoboWeedMaPS project. Technologies like this allow for collaboration between authorities and agriculture and other interest organizations. The RoboWeedMaPS system contains: 200+ datasets > 1200 ha distributed in Denmark.
We wanted to ask the following questions: • What is the reduction potential? • What is the economy for the farmer? • What pesticide amounts should be used? • What is the scenario scaled up to the full Danish grain area?
PotentialBesides the significant reduction of the amount of area sprayed with herbicides as previously reported the report showed also a great potential in Avoidance of treatment with wrong herbicides based on weed population analysis Potential of mapping of weeds of interest (e.g. creeping thistle) and field tailored treatment plans for them. Saving potential for costs of herbicide, TFI and ELI in most fields observed You can read the report here:
Analysis of Potential Herbicide Savings – Precision FarmingOutlook:
With a follow up project the partnership intended to find some user examples and get more in depth data on how treatment based on RWM recommendation will compare to currently recommended treatments, and a non treatment of a field
This project was the base for our RoboWeedMaps service that can provide automated weed detection, mapping and variable precision control of weeds.
Further reading:
RoboWeedMaps
ipmconsult.dk
Datalogisk (danish)
PROJECTS
OVERVIEW
Below you can find a list of projects where we are/were officially partners. However, with RoboWeedMaps we have been subcontractor on several other projects in the field of agriculture. Other crops we worked with were e.g. spinach, sweet pea, potato and white cabbage.
- Evaluation of weed ID and control – as well as value for the farmer (2021-2024) Danish Environmental Protection Agency
- MST-RWM-Analysis (2022-2024) MST
- Bedre utnytting av kløver i konvensjonell drift (CloverSense; Norway; 2023)
- RWMGrowth (RWM; 2022) Innovationsfonden
- FAIRshare (RWM; 2019; as subcontractor for Patriotisk Selskab) Horizon2020
- Smartgrass (2017) Innovationsfonden
- RoboWeedMaPS (RWM; 2017) Innovationsfonden
- ClowerSense (2016) GUDP
- RoboWeedSupport (RWM; 2013) GUDP
THEORETICAL
MATERIAL
Publications with I∙GIS contributions
RoboWeedMaps
- Analysis of potential herbicide savings using experience and data from the RoboWeedMaps project (english version)
- Analyse af mulige herbicidbesparelser ved brug af erfaringer og data fra RoboWeedMaps (dansk version)
- Open Plant Phenotyping Database
- Aarhus University RoboWeedMaps page
- Mads Dyrmann, Søren Skovsen, Morten Stigaard Laursen, and Rasmus Nyholm Jørgensen. (2018). Using a fully convolutional neural network for detecting locations of weeds in images from cereal fields. 14th International Conference on Precision Agriculture
- Morten Stigaard Laursen, Rasmus Nyholm Jørgensen, Mads Dyrmann, Robert Poulsen. (2017). RoboWeedSupport – Sub Millimeter Weed Image Acquisition in Cereal Crops with Speeds up till 50 Km/h. International Journal of Biological, Biomolecular, Agricultural, Food and Biotechnological Engineering (ICSWTS 2017)
CloverSense
- Aarhus University CloverSense page
- Søren Kelstrup Skovsen, Morten Stigaard Laursen , Rebekka Kjeldgaard Kristensen, Jim Rasmussen, Mads Dyrmann , Jørgen Eriksen, René Gislum, Rasmus Nyholm Jørgensen, Henrik Karstoft 1. (2020). Robust Species Distribution Mapping of Crop Mixtures Using Color Images and Convolutional Neural Networks. Sensors
- Søren Skovsen, Mads Dyrmann, Anders Krogh Mortensen, Kim Arild Steen, Ole Green, Jørgen Erikse, René Gislum, Rasmus Nyholm Jørgensen, and Henrik Karstoft. (2017). Estimation of the Botanical Composition of Clover-Grass Leys from RGB Images Using Data Simulation and Fully Convolutional Neural Networks. Sensors, special issue: Sensors in Agriculture (Paper)
OUR R&D
PARTNERS
As we strongly believe in the importance of a knowledge-driven approach when improving our products and services, we always aim at collaborating with renowned researchers from top universities and research institutions.
Therefore we are proud to present this list of collaborating research partners:









